Этот раздел содержит всю необходимую информацию касающуюся преднастроек и наладки системы контроля горючей смеси (EGO control) в ЭБУ MegaSquirt III. При помощью алгоритмов c обратной связью по лямбде, MegaSquirt может корректировать величину впрыскиваемого топлива, тем самым подгоняя смесь под значение уканное в таблице AFR или EGO Target(volts) в зависимости от типа используемого датчика кислорода.
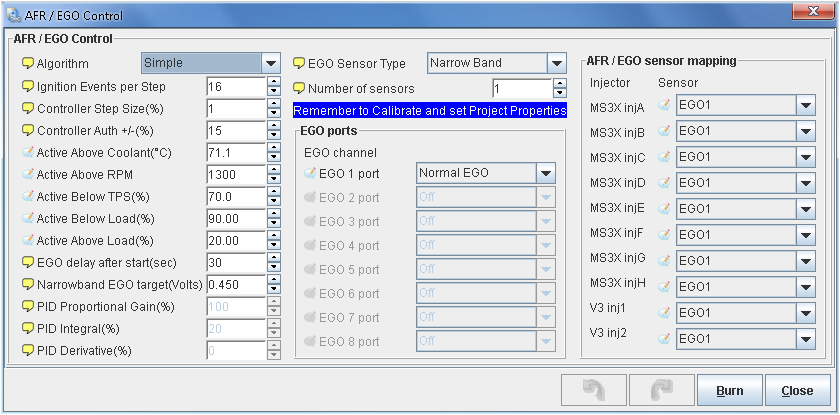
Нижеперечисленные настройки определяют поведение регулятора смеси
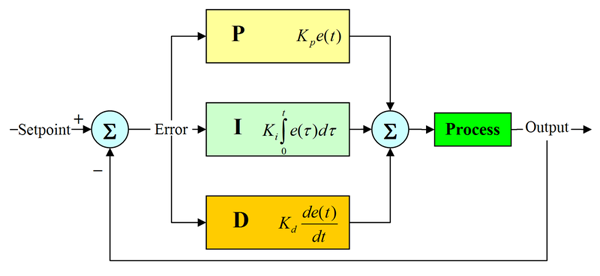
В основном PID применяется в различных системах управления приводом.
Более подробную информацию можно найти на страничке
Wikipedia.
Возможны следующие варианты:
Это меню позволяет определить к какому из портов подключен датчик кислорода. Количество активных окон равно количеству используемых датчиков указанных выше.
Датчики можно подключить к следующим портам MS3:
Это меню позволяет распределить используемые датчики кислорода по отдельным форсункам. Т.е. данные, для коррекции смеси для отдельно взятой форсунки, будут браться только с конкретно указанного датчика.
Привязать датчики можно к следующим выходам форсунок:
Большинство узкополосных датчиков могут точно определять только стехиометрическую смесь (14.7:1 для бензина). Такой она будет, если напряжение на выходе лямбда зонда равно 0.45В. При бедной смеси (выше 14.7:1) напряжение нелинейно опускается ниже этой отметки. При богатой – поднимается выше. Подобная нелинейность делает невозможным использование алгоритмов корректировки смеси в диапазоне отличном от стехиометрии.
По этой причине, при работе с узкополосными датчиками лучше использовать простой алгоритм.
Простой алгоритм корректирует смесь добавляя процент [Controller Step Size] , к расчётной величине топлива, если датчик показывает что сметь бедная и вычитает, если смесь богатая кождый [Ignition Events per Step] момент зажигани.
При настройке простого алгоритма с узкополосным датчиком, советую придерживаться следующих рекомендаций:
По существу, настройка простого алгоритма с широкополосным датчиком ничем не отличается от настройки с узкополосным. Единственное отличие в том, что теперь смесь будет подгонятся к значениям указанным в таблице AFR. И так же, как и с узкополосным, не рекомендуется распространять диапазон влияния алгоритма на максимально-открый дроссель и максимальную нагрузку. Это попрежнему связано с большой погрешностью зонда на высоких температурах и большом давлении, имеющих место в таких режимах.
Недостатком "простого" алгоритма является его линейность. Т.е. большие значения [Controller Step Size] могут привести к постоянным колебаниям смеси в районе стехиометрии, а малые к недостаточной (слабой/медленной) коррекции.
Рекомендации по настройке простого алгоритма так же действительны и для PID-a.
Дополнительно, ввиду того, что избежать колебаний смеси при использовании узкополосного датчика практически невозможно, советую начинать отстройку алгоритма с подбора параметра [I] . Нужно стремиться к тому, чтобы смесь подгонялась к желаемому значению как можно быстрее, т.е. за минимальное количество колебаний. Как только это получилось можно добавить самую малость, а то и вообще ничего, параметра [P] . Этот параметр отвечает за увеличение количества топлива используемого для коррекции пропорционально расстоянию до цели. На практике это помогает быстрее корректировать. Однако по причине всё той же нелинейности характеристики узкополосного датчика использование больших значений [P] с пользой не получится.
Так же как и в PID-алгоритме узкополосного датчика, параметр [I] нужно подбирать так, чтобы смесь подгонялась к желаемому значению за минимальное количество колебаний.
Дополнительно, ввиду того что широкополосный датчик имеет линейную характеристику, можно установить параметр [P] побольше. Это поможет регулятору быстрее отреагировать на большую разницу между действительным и желаемым значением смеси. Тем не менее не стоит увлекаться! Слишком большое значение [P] и имеющаяся задержка между впрыском топлива и регистрацией показаний после его сгорания на выходе, могут плохо сказаться на конечном результате. В особенности если установлено несколько датчиков.
И наконец, небольшое количество параметра [D] поможет снизить чувствительность регулятора при быстрых изменениях смеси. Это необходимо для уменьшения количества колебаний и «переборов» за желаемое значение.
